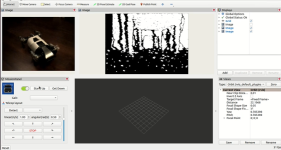
使用机器人操作系统ROS 2和仿真软件Gazebo 9搭建机器人教程(一) 本篇,通过此案例学习并熟练掌握ROS2的如下内容: ROS2常用命令回顾 遥控机器人在环境中运动 rqt和rviz2 摄像头图像显示和激光数据可视化 ROS2...
”az gazebo rcl ros 仿真软件 可视化 命令 操作 操作系统 教程 机器人 系统 软件“ 的搜索结果



FANUC机器人模拟仿真软件ROBOGUIDE的基本操作介绍
本文为使用ROS 2和Gazebo9搭建仿真机器人详细指南。 确保已按如下说明安装ROS和Gazebo: ROS 2安装。二进制软件包的安装足以满足该项目的需求,但是如果感兴趣,还可以选择从源代码搭建。Dashing或Eloquent均可...
KUKA.Sim 是 KUKA 设备和机器人的模拟和离线编程软件。KUKA.Sim Pro 用于 KUKA 机器人的完全离线编程。(含机器人库)
对导入Matlab环境中的机器人模型进行可视化运动仿真,主要运用MATLAB App Designer进行操作界面的简单设计,实现对机器人基于关节运动和TCP运动的手动操作可视化运动仿真。 一 MATLAB App Designer MATLAB App ...
在完成教程(一)搭建机器人和(二)命令遥控可视化后,将仿真机器人用于更为逼真的环境,可以测试如SLAM,区域覆盖以及场馆巡逻算法,这里环境均采用aws提供模型,分别为smallhouse和bookstore,环境适用于ROS2和...




本文已经首发在个人微信公众号:工业...MotoSim EG-VRC是安川机器人(Yaskawa)自有的虚拟仿真与离线编程软件,本期就使用MotoSim EG-VRC软件为大家介绍一下仿真项目的创建、机器人系统添加以及机器人的手动运行...
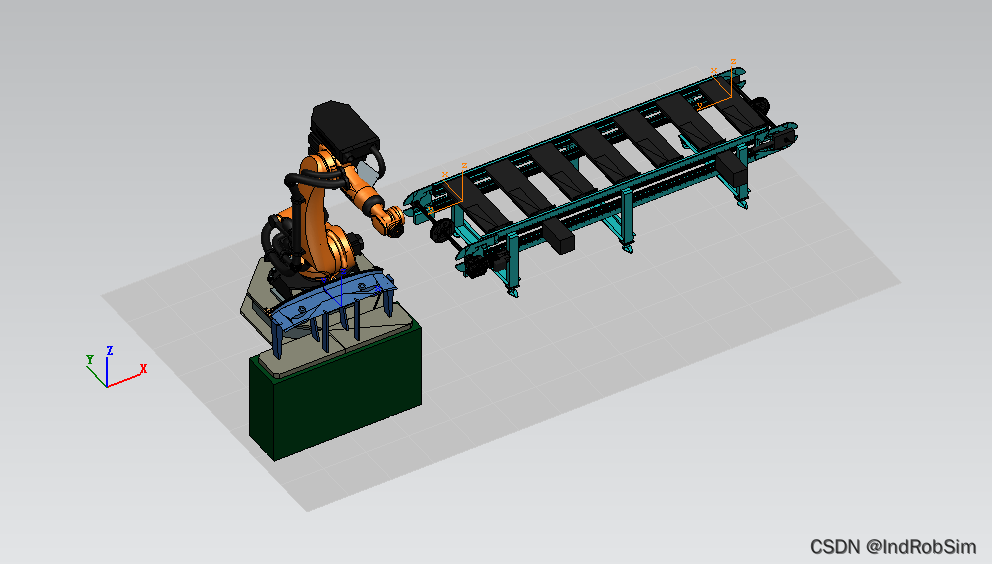
在科技和经济飞速发展的背景下,人力成本...为了解决这个问题,许多行业开始使用机器人代替传统的人力劳动,这已成为趋势。码垛机器人是一种结合高新技术与工业生产的产物,具有诸多优势,可以更好地服务于工业生产。

机器人系统常用仿真软件介绍和效果 2018 ROS Melodic的迷失与救赎::https://blog.csdn.net/column/details/28058.html 2018 GitChat::沉迷机器人操作系统的一个理由和四种修仙秘籍 ROS机器人操作系统在线练习...

RoboDK(机器人仿真软件)是一款非常棒的工业机器人仿真工具。 该软件提供直观的用户界面,便于搭建虚拟工作环境,校准功能可以提高机器人精确度、改进生产,让你的工业机器人更加的操作灵活,需要的用户赶快来下载...
在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore): 多机器人-图书...






文件大小:30G内容包括:ROBOGUIDE软件+安装教程发那科工业机器人视频教程82集发那科机器人软件基本操作23个视频FANUC机器人全套资料(60个PDF)目录:├<1-发那科工业机器人视频教程82集>│├第10课 发那科...
推荐文章
- emwin使用自定义字库显示字母及汉字特殊字符_emwin自带字库吗-程序员宅基地
- Qt5开发及实例V2.0-第十一章-Qt事件处理及实例-程序员宅基地
- vue中使用百度地图_vue使用百度地图-程序员宅基地
- php implode 源码,PHP源码阅读笔记一:explode和implode函数-程序员宅基地
- 牛顿法、拟牛顿法、高斯-牛顿法、共轭梯度法推导总结_共轭梯度法的雅可比矩阵-程序员宅基地
- Prewitt和Sobel算子_prewitt算子-程序员宅基地
- 人工神经网络知识、激活函数、正则化、优化技术、Batch Normalization、Layer Normalization_深度学习 梯度为1-程序员宅基地
- 第二届Stata中国用户大会暨“计量经济方法及应用研讨会”会议通知_徐青青 南开大学-程序员宅基地
- python读取本地html文件表格数据保存为csv格式_urlopen.read() to_csv-程序员宅基地
- 【操作系统】Centos7搭建PXE高效能批量网络装机实战_centospxe-程序员宅基地